


The Project.
Objective and Goals of the Project
It involves the development of an innovative passive compliance head for marble cutting operations (milling for material removal), specifically designed to be adapted on articulated robotic arms. The head will be manufactured by a 3D printer and modeled with stochastic lattice structures of controlled elasticity (compliance). The head will effectively improve the oscillatory behavior of the arm's end effector, to make the processing smoother, more accurate and with reduced strain on the arm's mechanical parts. This feature constitutes the innovation of RoboMar.
Articulated robotic arms are already used, to a limited extent, for complex 3D operations (e.g., statues, monument decoration, etc.) Examples (competitive solutions) are the RM-RoboCut3D Stone from Ronchini company and the Milling & Sculpting from New Age Robotics.


Image 1. Robotic marble processing systems
Compared to GANTRY systems of 3-4 axes, the articulated arms of 6 axes offer much greater flexibility (dexterity) to create complex geometries. However, they present (compared to GANTRY systems of 3-4 axes) low dimensional accuracy (a negligible fact in artistic operations) and most importantly, low mechanical robustness and a high sensitivity of the control system to the tool's oscillatory behaviors. During the marble milling process, as the tool oscillates, these oscillations are transmitted to all the arm's joints, causing the Chatering phenomenon. This affects the surface quality of the processed material and, above all, creates strains on the tool, the arm, the processed piece, and instabilities in the arm's control system.
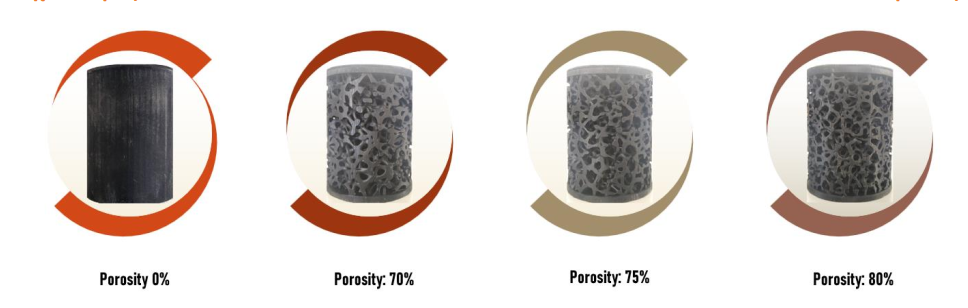
This proposal aims to tackle these oscillatory behaviors by developing a vibration damping mechanism. The mechanism will be inserted between the processing tool and the arm's end effector. It will consist of 3D printed (3D printing - SLA) stochastic lattices with controlled geometry and topology, as shown in the images below:
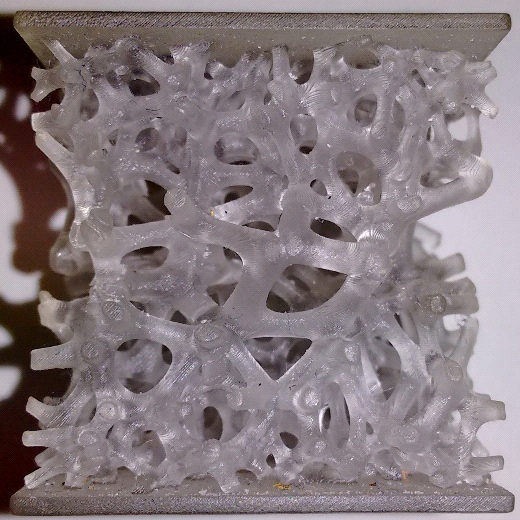
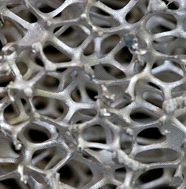
Stochastic lattices have already been used in a research project by the contractor's team (DIPAE formerly TEI-AMTH): Acronym: AMLAR - Space Lattice Structures for Lightweight Machine Tool Parts, Bilateral R&D Cooperation Greece - Israel 2013-2015. In this project, the lattices were successfully integrated into the geometry of cutting tool holders (mandrels) to reduce weight while increasing damping ability.
In RoboMar, an enhanced version of these specific lattices will be used, with varying beam thickness and changing structural density. An optimization of the head's design, the parameters of the stochastic lattice, and the density distribution will be performed using advanced oscillation case simulations and the Finite Element Method (FEM).
Τimetable.
The project was implemented in Work Units with distinct actions, as follows:
WU1. Supporting Actions
It refers to actions preparing the whole research process and work design actions, taking into account updated data and information. It includes the following activities:
-
1.1 Technological Review
Detailed update of technological knowledge and review of existing commercial products, technological solutions, and scientific research related to the project (technology update).
-
1.2 Market Trends
Recording and analysis of market trends regarding the use of marble for monuments etc..
-
1.3 Development of Research Methodology
Detailed theoretical approach to the research process that will be implemented, specifying the most important parameters to be considered, the objectives, and the expected results.
-
1.4 Research Equipment
Detailed determination of the functional requirements of the research devices. Determination of the type of equipment that meets the functional requirements. Specifications of the components (technical specifications - dimensioning - general design of functional requirements - general specifications of equipment & materials - instructions & guidelines)."


WU2. Laboratory Tests
Includes the following activities:
-
2.1 Study of Cutting Forces
After a relevant study on the marbles to be used as specimens, and their hardness characteristics, laboratory cutting tests will be conducted with a rotary tool (spindle). The marble processing procedure will be studied on a CNC milling machine and KISTLER 10KN 80KHz laboratory dynamometers, in order to extract quantitative and qualitative conclusions about the developed forces and cutting vibrations. Capturing in time-domain & frequency-domain. The cutting conditions (cutting speed, feed speed, axial depth of cut, etc.) will be determined by the company, as applied in marble cutting processing.
-
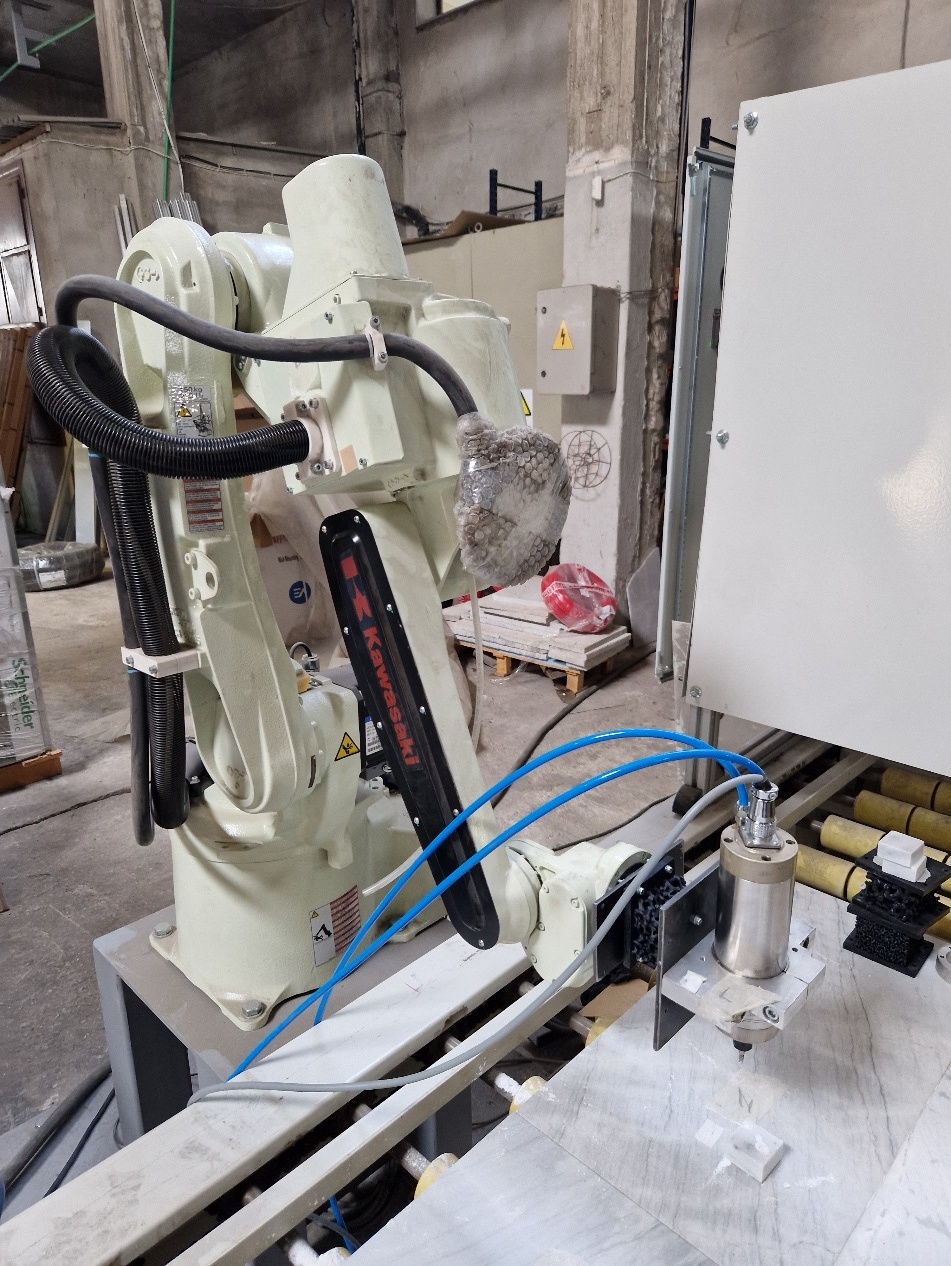
2.2 Dynamic Behavior of the Arm
Study of natural frequencies, response to vibrational loads and instability conditions, of an industrial Kawasaki arm, in various joint configurations. The arm will be excited in the laboratory at its end with (a) a sinusoidal signal exciter, (b) an impact hammer (modal analysis), and (c) during actual marble cutting with chattering phenomena. Metrological determination of response signals.
-
2.3 Development of 3D Meshes
The development of the related algorithm will be performed, which will be able to determine the number of beams that make up the honeycomb lattice and their thickness. Also, it will be possible to modify the density of the honeycomb at will or by setting parameters, across the entire structure or in regions of it. Design - geometric modeling of 3D honeycomb lattices. Design – modeling of laboratory samples with the honeycombs that will be developed.
-
2.4 Construction of Laboratory Specimens
From various potential industrial materials, in laboratory-controlled 3D printers. In the present project, the use of three additive manufacturing methods, FDM/FFF, SLA and SLS, will be examined. A search for 3D printing materials that meet the requirements regarding their mechanical behavior will be conducted. Since damping is required, the potential materials to be used should have a combination of high strength and elasticity.
-
2.5 Mechanical Behavior of Specimens
Study of Modal Analysis of their dynamic characteristics and strength measurements in compression – tension – impact, and using a High-Speed Camera 20,000 FPS. Simulations of mechanical behavior of the honeycombs with finite elements FEM- FEA. Experimental tests of vibrational behavior during actual marble cutting on a CNC milling machine, in accordance with the results of the above activities.
-
2.6 Modeling of the Support Base
Design - geometric modeling of the head support bases using the 3D honeycombs that have been selected in a previous section. Construction of these bases from various industrial materials, as selected in a previous section, in laboratory-controlled 3D printers FDM-SLS-SLA.
-
2.7 Passive Compliance Testing
Experimental testing of the lattice structures to be developed. Spindle tool action on an industrial Kawasaki arm and execution of real marble cutting with chattering phenomena and 3D motion of the end-effector, taking into account the kinematic features that will emerge from previous work. Tests also without passive compliance and comparison of chattering phenomena and instability conditions. Oscillating signal measurements. Qualitative and quantitative analysis of the results. Arm programming, cutting tests, G-Code software on Kawasaki, optimization of cutting conditions, problem-solving, cutting strategies. Quality measurements of surface and dimension accuracy.
-
2.8 Fatigue Study
Experimental recording and theoretical approach and estimation of the fatigue (cyclic loading) of the lattice structures, as they have been produced and used in the previous work and for their specific manufacturing materials. Repeated dynamic stresses will be applied to the lattices to simulate the typical mechanical loads they are expected to undertake when used in real constructions. The mechanical tests will be conducted with control of the applied force and the diagrams of applied force - fatigue cycles and failure will be constructed in order to estimate the limit of enduring fatigue resistance of the lattices under investigation.
WU1. Conclusions - Publicity
Includes the following activities:
-
3.1 Results - Conclusions
Processing and scientific-technological documentation and analysis of the above industrial scale tests, in order to derive the materials that will be applied and proposed for industrial use. Repeating stages of EE2 & EE3 (trials - tests etc.) based on the industrial results report, for selected and specific materials, to derive targeted research results for specific cases that require further study.
-
3.2 Technical Application Study
Study of the analysis of the required resources, processes, and technical upgrades, so that the results of industrial research can be applied to the production process and a new product, commercially available in the near future, will be produced.
-
3.3 Publicity
A special website for the project and an information brochure (leaflet) and poster will be created. The research results will be published in a national/international conference and exhibitions/technological days and on the website that will be developed for the project.
Results.
-
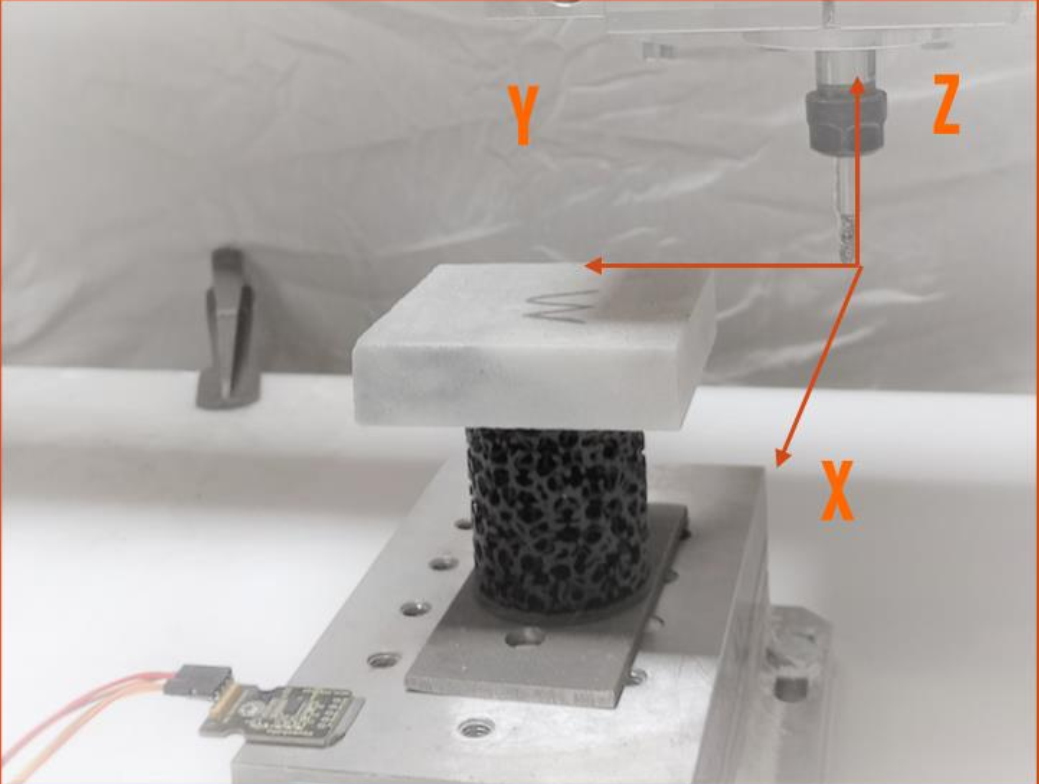
The results of the tests conducted on the 16 specimens show that there was a general decrease in acceleration values, in relation to the milling performed without the use of a damper. This was valid regardless of the properties of the specimens.
-
In more detail, it was evident that the addition of flexible resin to the mixture caused an upward trend in the damping ratio. The decrease in acceleration values was more noticeable on the y- axis, which had the highest acceleration values without the use of dampers. This axis corresponds to the motion axis of the milling tool.
-
However, there were some exceptions. For example, mixture 4 was very flexible and did not produce comparable results due to the bending of the specimen. Although mixture 4 was not suitable for the test, a portion of the flexible resin added to the resilient resin improved the damping capability beyond mixture 1.
-
Mixture 2 demonstrated the best overall performance, especially when combined with 75% and 80% porous materials. On the other hand, mixture 3 had reduced performance on the z-axis, due to its minor deformation which affected the direction of the applied force.
-
The results of the tests showed increased damping properties, which varied depending on the geometry of the structure and the materials used. Overall, based on these results, it is suggested to incorporate lighter vibration damping structures into the mechanical components of robotic milling.
-
Finally, it should be noted that the light specimens presented reduced acceleration values. This is particularly positive, as light objects are considered preferable due to their lower material requirement, making the light specimens more suitable for the application.
Conferences - Publications.
Contact.
