


Το Έργο.
Αντικείμενο και Στόχοι του Έργου
Αφορά στην ανάπτυξη μιας καινοτόμου κεφαλής παθητικής ενδοτικότητας για κατεργασίες κοπής (φρεζάρισμα για αφαίρεση υλικού) μαρμάρων ειδικά για προσαρμογή σε αρθρωτούς ρομποτικούς βραχίονες. Η κεφαλή θα είναι κατασκευασμένη από 3Δ εκτυπωτή και μοντελοποιημένη με στοχαστικά κυψελοδικτυώματα ελεγχόμενης ελαστικότητας (ενδοτικότητας). Η κεφαλή θα βελτιώνει αποτελεσματικά την ταλαντωτική συμπεριφορά του άκρου (end-effector) του βραχίονα, προκειμένου η κατεργασία να είναι ομαλότερη, ακριβέστερη και με μειωμένη καταπόνηση για τα μηχανικά μέρη του βραχίονα. Αυτό το στοιχείο αποτελεί και την καινοτομία του RoboMar.
Αρθρωτοί ρομποτικοί βραχίονες χρησιμοποιούνται ήδη, σε περιορισμένο βαθμό, για πολύπλοκες 3Δ κατεργασίες (π.χ. αγάλματα, διακόσμηση μνημείων κτλ.) Παραδείγματα (ανταγωνιστικές λύσεις) είναι το RM-RoboCut3D Stone της εταιρείας Ronchini και το Milling & Sculpting της εταιρείας New Age Robotics.


Εικόνα 1. Ρομποτικά συστήματα κατεργασίας μαρμάρων
Σε σχέση με συστήματα GANTRY 3-4 αξόνων, οι αρθρωτοί βραχίονες 6 αξόνων προσφέρουν πολύ μεγαλύτερη ευελιξία (dexterity) ώστε να είναι δυνατή η κατασκευή πολύπλοκων γεωμετριών. Παρουσιάζουν όμως (σε σχέση με συστήματα GANTRY 3-4 αξόνων) μικρή διαστατική ακρίβεια (γεγονός αμελητέο σε εικαστικές κατεργασίες) και το κυριότερο, μικρή μηχανολογική στιβαρότητα και μεγάλη ευαισθησία του συστήματος ελέγχου σε ταλαντωτικές συμπεριφορές του εργαλείου. Καθώς δε, κατά την κατεργασία φρεζαρίσματος μαρμάρων, το εργαλείο παρουσιάζει ταλαντώσεις, αυτές μεταφέρονται σε όλες τις αρθρώσεις του βραχίονα ώστε να παρουσιάζεται το φαινόμενο Chatering. Γεγονός που αφενός επηρεάζει την ποιότητα επιφανείας του κατεργαζόμενου υλικού και, κυρίως, δημιουργεί καταπονήσεις στο εργαλείο, στον βραχίονα, στο κατεργαζόμενο τεμάχιο και αστάθειες στο σύστημα ελέγχου του βραχίονα.
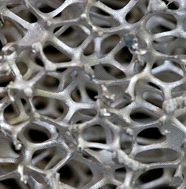
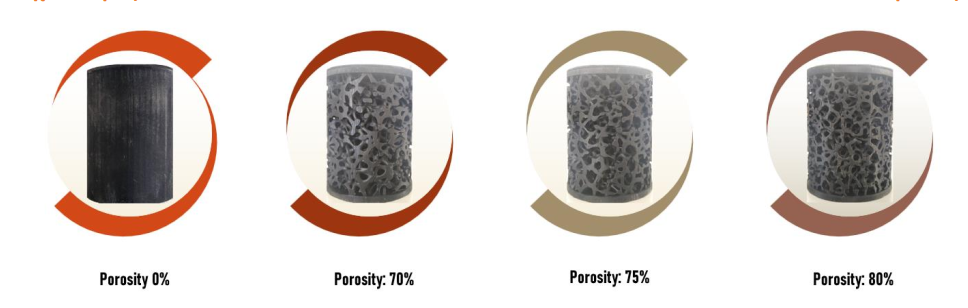
Αυτές τις ταλαντωτικές συμπεριφορές έρχεται να αντιμετωπίσει η παρούσα πρόταση, με την ανάπτυξη ενός μηχανισμού απόσβεσης των ταλαντώσεων. Ο μηχανισμός θα παρεμβάλλεται μεταξύ του εργαλείου κατεργασίας και του άκρου (end-effector) του βραχίονα. Ο μηχανισμός θα αποτελείται από 3Δ εκτυπωμένα (3D printing – SLA) στοχαστικά κυψελοδικτυώματα με ελεγχόμενη γεωμετρία και τοπολογία, όπως παρακάτω εικόνες:
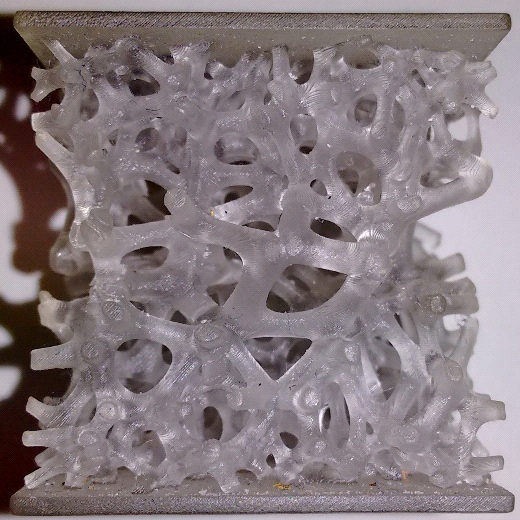
Στοχαστικά κυψελοδικτυώματα, έχουν ήδη χρησιμοποιηθεί σε ερευνητικό πρόγραμμα της ομάδας του υπεργολάβου (ΔΙΠΑΕ πρώην ΤΕΙ-ΑΜΘ): Ακρωνύμιο: AMLAR - Space Lattice Structures for Lightweight Machine Tool Parts, Διμερής Ε&Τ Συνεργασία Ελλάδας- Ισραήλ 2013-2015. Στο εν λόγω έργο με επιτυχία ενσωματώθηκαν τα κυψελοδικτυώματα στη γεωμετρία συγκρατητών κοπτικών εργαλείων (μανέλες) προκειμένου να μειωθεί το βάρος αυξάνοντας την ικανότητα απόσβεσης.
Στο RoboMar θα χρησιμοποιηθεί μια βελτιωμένη έκδοση των συγκεκριμένων κυψελοδικτυωμάτων με μεταβαλλόμενο πάχος δοκίδας και επίσης μεταβαλλόμενη πυκνότητα δομής. Θα πραγματοποιηθεί βελτιστοποίηση του σχεδιασμού της κεφαλής, των παραμέτρων του στοχαστικού κυψελοδικτυώματος και της κατανομής της πυκνότητας με εξελιγμένες προσομοιώσεις περιπτώσεων ταλάντωσης και με μέθοδο των πεπερασμένων στοιχείων (FEM).
Χρονοδιάγραμμα.
Το έργο υλοποιήθηκε σε Ενότητες Εργασίας με διακριτές δράσεις, ως εξής:
ΕΕ1. Υποστηρικτικές Δράσεις
Αφορά σε δράσεις προετοιμασίας της όλης ερευνητικής διαδικασίας και δράσεις σχεδιασμού εργασιών, λαμβάνοντας υπόψη επικαιροποιημένα στοιχεία και δεδομένα. Περιλαμβάνει τις παρακάτω δραστηριότητες:
-
1.1 Τεχνολογική Επισκόπηση
Αναλυτική επικαιροποίηση τεχνολογικών γνώσεων και επισκόπηση υπαρχόντων εμπορικών προϊόντων, τεχνολογικών λύσεων και επιστημονικών ερευνών που σχετίζονται με το έργο (technology update).
-
1.2 Τάσεις Αγοράς
Καταγραφή και ανάλυση των τάσεων της αγοράς όσον αφορά τη χρήση μαρμάρων για μνημεία κτλ..
-
1.3 Ανάπτυξη Ερευνητικής Μεθοδολογίας
Αναλυτική θεωρητική προσέγγιση της ερευνητικής διαδικασίας που θα εφαρμοστεί με προσδιορισμό των σημαντικότερων παραμέτρων που θα πρέπει να ληφθούν υπόψη, των στόχων και των αναμενόμενων αποτελεσμάτων.
-
1.4 Ερευνητικός Εξοπλισμός
Αναλυτικός καθορισμός των λειτουργικών απαιτήσεων των ερευνητικών διατάξεων. Προσδιορισμός του τύπου του εξοπλισμού που ικανοποιεί τις λειτουργικές απαιτήσεις. Προδιαγραφές των εξαρτημάτων (τεχνικές προδιαγραφές – διαστασιολόγηση – γενικός σχεδιασμός λειτουργικών απαιτήσεων – γενικές προδιαγραφές εξοπλισμού & υλικών – οδηγίες & κατευθυντήριες γραμμές).


ΕΕ2. Εργαστηριακές Δοκιμές
Περιλαμβάνει τις παρακάτω δραστηριότητες:
-
2.1 Μελέτη Δυνάμεων Κοπής
Μετά από σχετική μελέτη για τα μάρμαρα που θα χρησιμοποιηθούν ως δοκίμια, και τα σκληρομετρικά χαρακτηριστικά τους, θα διεξαχθούν εργαστηριακές δοκιμές κοπής με περιστροφικό εργαλείο (spindle). Η διαδικασία της κατεργασίας του μαρμάρου θα μελετηθεί σε φρέζα CNC και εργαστηριακά δυναμόμετρα KISTLER 10KN 80KHz, προκειμένου να εξαχθούν ποσοτικά και ποιοτικά συμπεράσματα σχετικά με τις αναπτυσσόμενες δυνάμεις και ταλαντώσεις κοπής. Αποτύπωση σε time-domain & frequency-domain. Οι συνθήκες κοπής (ταχύτητα κοπής, ταχύτητα πρόωσης, αξονικό βάθος κοπής, κ.λπ.) θα καθοριστούν από την εταιρεία, όπως εφαρμόζονται σε κατεργασία κοπής μαρμάρου.
-
2.2 Δυναμική Συμπεριφορά Βραχίονα
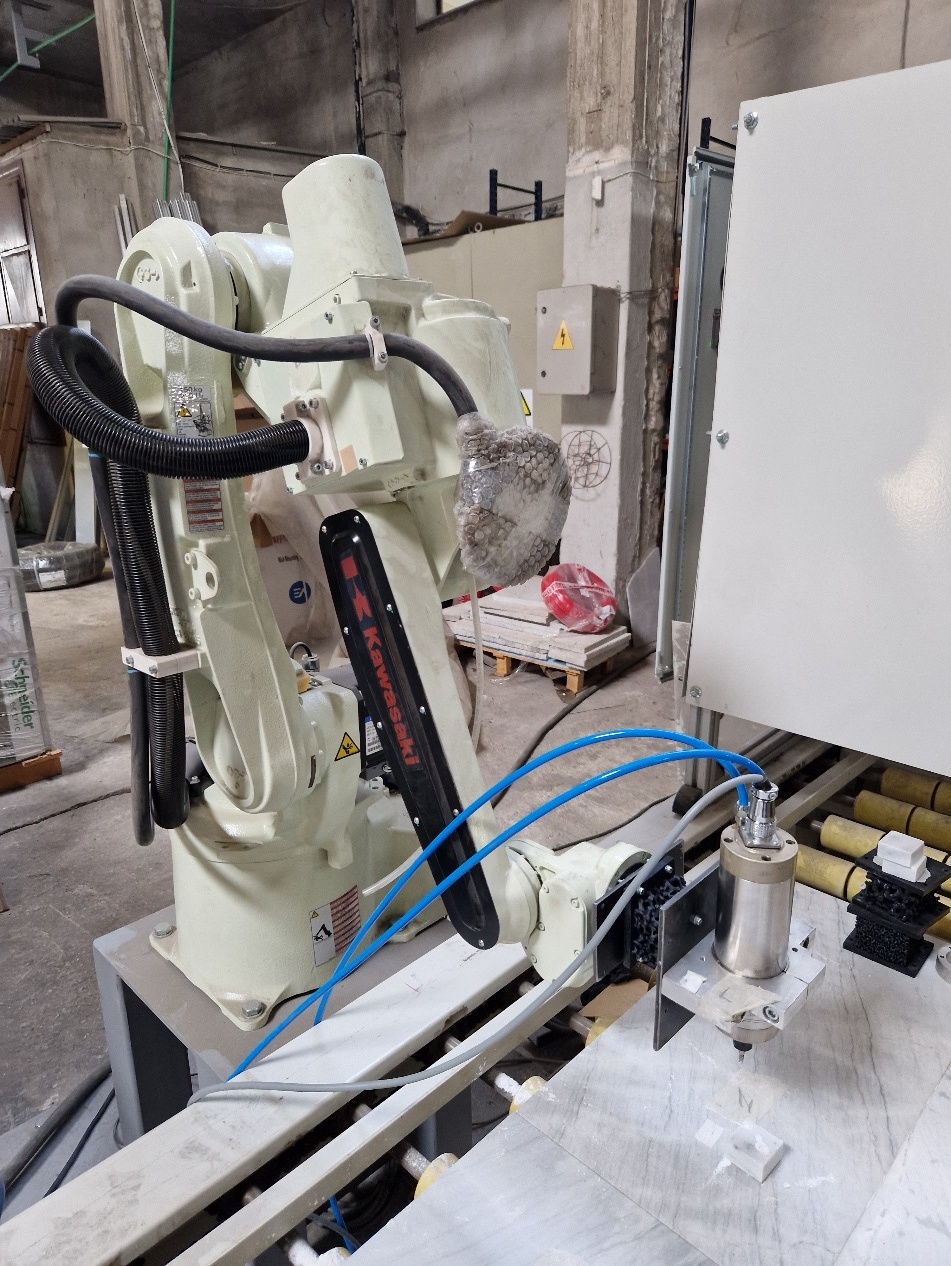
Μελέτη ιδιοσυχνοτήτων, απόκρισης σε ταλαντωτικά φορτία και συνθηκών αστάθειας, βιομηχανικού βραχίονα Kawasaki, σε διάφορες διατάξεις των αρθρώσεων (joint configurations). Ο βραχίονας θα διεγερθεί εργαστηριακά στο άκρο του με (α) διεγέρτη ημιτονοειδούς σήματος, (β) κρουστικό σφυρί (modal analysis) και (γ) σε πραγματική κοπή μαρμάρου με φαινόμενα chattering. Μετροτεχνικός προσδιορισμός των σημάτων της απόκρισης.
-
2.3 Ανάπτυξη 3Δ Πλεγμάτων
Θα πραγματοποιηθεί η ανάπτυξη του σχετικού αλγορίθμου, ο οποίος θα έχει τη δυνατότητα καθορισμού του αριθμού των δοκίδων που συνθέτουν το στοχαστικό κυψελοδικτύωμα καθώς και το πάχος τους. Επίσης, θα είναι δυνατή η τροποποίηση της πυκνότητας του κυψελοδικτυώματος κατά βούληση ή με τον καθορισμό παραμέτρων, σε ολόκληρη τη δομή ή σε περιοχές αυτής. Σχεδιασμός - γεωμετρική μοντελοποίηση 3Δ κυψελοδικτυωμάτων. Σχεδιασμός – μοντελοποίηση εργαστηριακών δοκιμίων με τα κυψελοδικτυώματα που θα αναπτυχθούν.
-
2.4 Κατασκευή Εργαστηριακών Δοκιμίων
Από διάφορα υποψήφια βιομηχανικά υλικά, σε εργαστηριακούς 3D printers ελεγχόμενων συνθηκών. Στο παρόν έργο πρόκειται να εξεταστεί η χρήση τριών μεθόδων προσθετικής μηχανικής, οι FDM/FFF, SLA και SLS. Θα πραγματοποιηθεί αναζήτηση υλικών 3Δ εκτύπωσης που πληρούν τις απαιτήσεις όσο αφορά τη μηχανική συμπεριφορά τους. Καθότι απαιτείται απόσβεση τα υποψήφια προς χρήση υλικά θα πρέπει να έχουν έναν συνδυασμό υψηλής αντοχής και ελαστικότητας.
-
2.5 Μηχανική Συμπεριφορά Δοκιμίων
Μελέτη Modal Analysis των δυναμικών τους χαρακτηριστικών και μετρήσεις αντοχής σε θλίψη – εφελκυσμό – κρούση και με χρήση High Speed Camera 20.000 FPS. Προσομοιώσεις μηχανικής συμπεριφοράς των κυψελοδικτυωμάτων με πεπερασμένα στοιχεία FEM-FEA. Πειραματικές δοκιμές ταλαντωτικής συμπεριφοράς σε πραγματική κοπή μαρμάρου σε φρέζα CNC, σύμφωνα με τα αποτελέσματα των ανωτέρω δραστηριοτήτων.
-
2.6 Μοντελοποίηση Βάσης Στήριξης
Σχεδιασμός - γεωμετρική μοντελοποίηση των βάσεων στήριξης της κεφαλής με χρήση των 3Δ κυψελοδικτυωμάτων που έχουν επιλεγεί σε προηγούμενη ενότητα. Κατασκευή των εν λόγω βάσεων στήριξης από διάφορα βιομηχανικά υλικά, όπως έχουν επιλεγεί σε προηγούμενη ενότητα, σε εργαστηριακούς 3D printers ελεγχόμενων συνθηκών FDM-SLS-SLA.
-
2.7 Δοκιμές Παθητικής Ενδοτικότητας
Πειραματικές δοκιμές των κυψελοδικτυωμάτων που θα αναπτυχθούν. Έδραση εργαλείου spindle σε βιομηχανικό βραχίονα Kawasaki και διεξαγωγή πραγματικής κοπής μαρμάρου με φαινόμενα chattering και με 3Δ κίνηση του end-effector, λαμβάνοντας υπόψη και τα κινηματικά χαρακτηριστικά που θα προκύψουν από προηγούμενη εργασία. Δοκιμές επίσης χωρίς παθητική ενδοτικότητα και σύγκριση φαινομένων chattering και συνθηκών αστάθειας. Μετρήσεις ταλαντωτικών σημάτων. Ποιοτική και ποσοτική ανάλυση των αποτελεσμάτων. Προγραμματισμός βραχίονα, δοκιμές κοπής, λογισμικό G-Code σε Kawasaki, βελτιστοποίηση συνθηκών κοπής, αντιμετώπιση προβλημάτων, στρατηγικές κοπής. Μετρήσεις ποιότητας επιφάνειας και ακρίβειας διαστάσεων.
-
2.8 Μελέτη Κόπωσης
Πειραματική καταγραφή και θεωρητική προσέγγιση και εκτίμηση της κόπωσης (cyclic loading) των κυψελοδικτυωμάτων, όπως αυτά έχουν παραχθεί και χρησιμοποιηθεί στην προηγούμενη εργασία και για τα συγκεκριμένα υλικά κατασκευής τους. Θα πραγματοποιηθούν επαναλαμβανόμενες δυναμικές καταπονήσεις σε κυψελοδικτυώματα με σκοπό να προσομοιάσουν τα τυπικά μηχανικά φορτία που αναμένεται να αναλάβουν όταν χρησιμοποιηθούν σε πραγματικές κατασκευές. Οι μηχανικές δοκιμές θα διεξαχθούν με έλεγχο της εφαρμοζόμενης δύναμης και θα κατασκευαστούν τα διαγράμματα εφαρμοζόμενης δύναμης - κύκλων κόπωσης και αστοχίας προκειμένου να εκτιμηθεί το όριο διαρκούς αντοχής σε κόπωση των υπο- εξέταση κυψελοδικτυωμάτων.
ΕΕ3. Συμπεράσματα – Δημοσιότητα
Περιλαμβάνει τις παρακάτω δραστηριότητες:
-
3.1 Αποτελέσματα - Συμπεράσματα
Επεξεργασία και επιστημονική – τεχνολογική τεκμηρίωση και ανάλυση των ανωτέρω δοκιμών βιομηχανικής κλίμακας, προκειμένου να προκύψουν τα υλικά που θα έχουν εφαρμογή και θα προταθούν για βιομηχανική χρήση. Επανάληψη των σταδίων των ΕΕ2 & ΕΕ3 (δοκίμια – δοκιμές κτλ.) με βάση την έκθεση βιομηχανικών αποτελεσμάτων, για επιλεγμένα και συγκεκριμένα υλικά, προκειμένου να προκύψουν στοχευμένα ερευνητικά αποτελέσματα για συγκεκριμένες περιπτώσεις που χρήζουν περεταίρω μελέτης.
-
3.2 Μελέτη Τεχνικής Εφαρμογής
Μελέτη ανάλυσης των απαιτούμενων πόρων, διαδικασιών και τεχνικών αναβαθμίσεων, προκειμένου τα αποτελέσματα της βιομηχανικής έρευνας να εφαρμοστούν στην παραγωγική διαδικασία και να προκύψει ένα νέο προϊόν, εμπορικά διαθέσιμο στο άμεσο μέλλον.
-
3.3 Δημοσιότητα
Θα δημιουργηθεί ειδική ιστοσελίδα για το έργο και ένα ενημερωτικό φυλλάδιο (leaflet) και αφίσα. Τα ερευνητικά αποτελέσματα θα δημοσιευτούν σε εθνικό / διεθνές συνέδριο και εκθέσεις / τεχνολογικές ημερίδες και στην ιστοσελίδα που θα αναπτυχθεί για το έργο.
Αποτελέσματα.
-
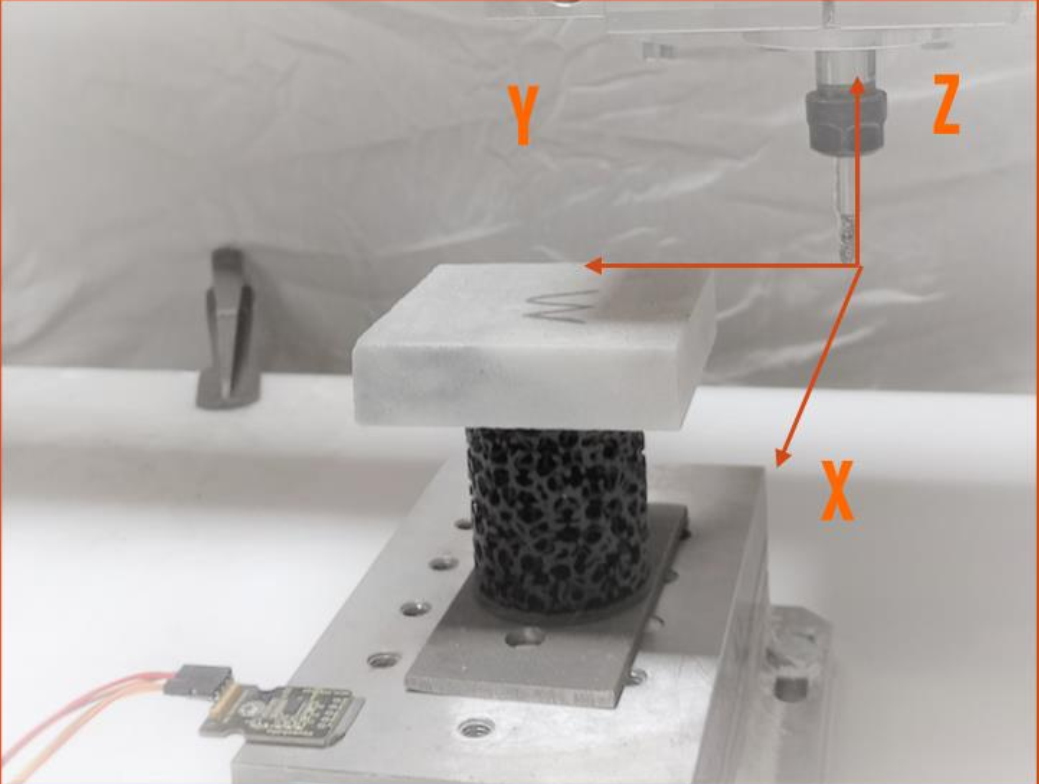
Τα αποτελέσματα των δοκιμών που διεξήχθησαν στα 16 δοκίμια δείχνουν ότι υπήρξε μια γενική μείωση των τιμών επιτάχυνσης, σε σχέση με το φρεζάρισμα που πραγματοποιήθηκε χωρίς τη χρήση αποσβεστήρα. Αυτό ήταν ισχύον ανεξαρτήτως των ιδιοτήτων των δοκιμίων.
-
Αναλυτικότερα, ήταν εμφανές ότι η προσθήκη εύκαμπτης ρητίνης στο μείγμα προκαλούσε μια ανοδική τάση στον λόγο απόσβεσης. Η μείωση των τιμών επιτάχυνσης ήταν πιο εμφανής στον άξονα y, που είχε τις υψηλότερες τιμές επιτάχυνσης χωρίς τη χρήση αποσβεστήρων. Αυτός ο άξονας αντιστοιχεί στον άξονα κίνησης του εργαλείου φρεζαρίσματος.
-
Υπήρξαν, ωστόσο, ορισμένες εξαιρέσεις. Για παράδειγμα, το μείγμα 4 ήταν πολύ ελαστικό και δεν παρήγαγε συγκρίσιμα αποτελέσματα λόγω της κάμψης του δοκιμίου. Παρ' όλο που το μείγμα 4 δεν ήταν κατάλληλο για τη δοκιμή, ένα μέρος της ελαστικής ρητίνης που προστέθηκε στην ανθεκτική ρητίνη βελτίωσε την αποσβεστική ικανότητα πέραν του μείγματος 1.
-
Το μείγμα 2 επέδειξε την καλύτερη συνολική απόδοση, ιδίως όταν συνδυάζεται με πορώδη 75% και 80%. Από την άλλη πλευρά, το μείγμα 3 είχε μειωμένη απόδοση στον άξονα z, λόγω της μικρής παραμόρφωσής του που επηρέασε την κατεύθυνση της εφαρμοζόμενης δύναμης.
-
Τα αποτελέσματα των δοκιμών έδειξαν αυξημένες αποσβεστικές ιδιότητες, οι οποίες διέφεραν ανάλογα με τη γεωμετρία της δομής και τα χρησιμοποιούμενα υλικά. Συνολικά, με βάση αυτά τα αποτελέσματα, προτείνεται η ενσωμάτωση ελαφρύτερων δομών απόσβεσης κραδασμών στα μηχανικά εξαρτήματα του ρομποτικού φρεζαρίσματος.
-
Τέλος, πρέπει να σημειωθεί ότι τα ελαφριά δοκίμια παρουσίασαν μειωμένες τιμές επιτάχυνσης. Αυτό είναι ιδιαίτερα θετικό, καθώς τα ελαφριά αντικείμενα θεωρούνται προτιμότερα λόγω της μικρότερης απαίτησης σε υλικό, κάνοντας τα ελαφριά δοκίμια καταλληλότερα για την εφαρμογή.
Συνέδρια - Δημοσιεύσεις.
Επικοινωνία.
